Learning-AI
CrowdDet: Detection in Crowded Scenes: One Proposal, Multiple Predictions
October 2020
tl;dr: Multiple detections per anchor for crowd detection.
Overall impression
The paper proposed the idea of multiple instance prediction, and used EMD (earth mover distance) and set NMS to accommodate the multiple prediction per anchor.
It achieves nearly 5% AP gain in CrowdHuman dataset.
Current works are either too complex or less effective for handling highly overlapped cases, or degrading the performance of less-overlapped cases.
Key ideas
- Multiple instance prediction: The prediction of nearby proposals are expected to infer the same set of instances, rather than distinguishing individuals.
- Some cases are inherently difficult and ambiguous to detect and differentiate such as ◩ or ◪.
- this also greatly eases the learning in crowded scene.
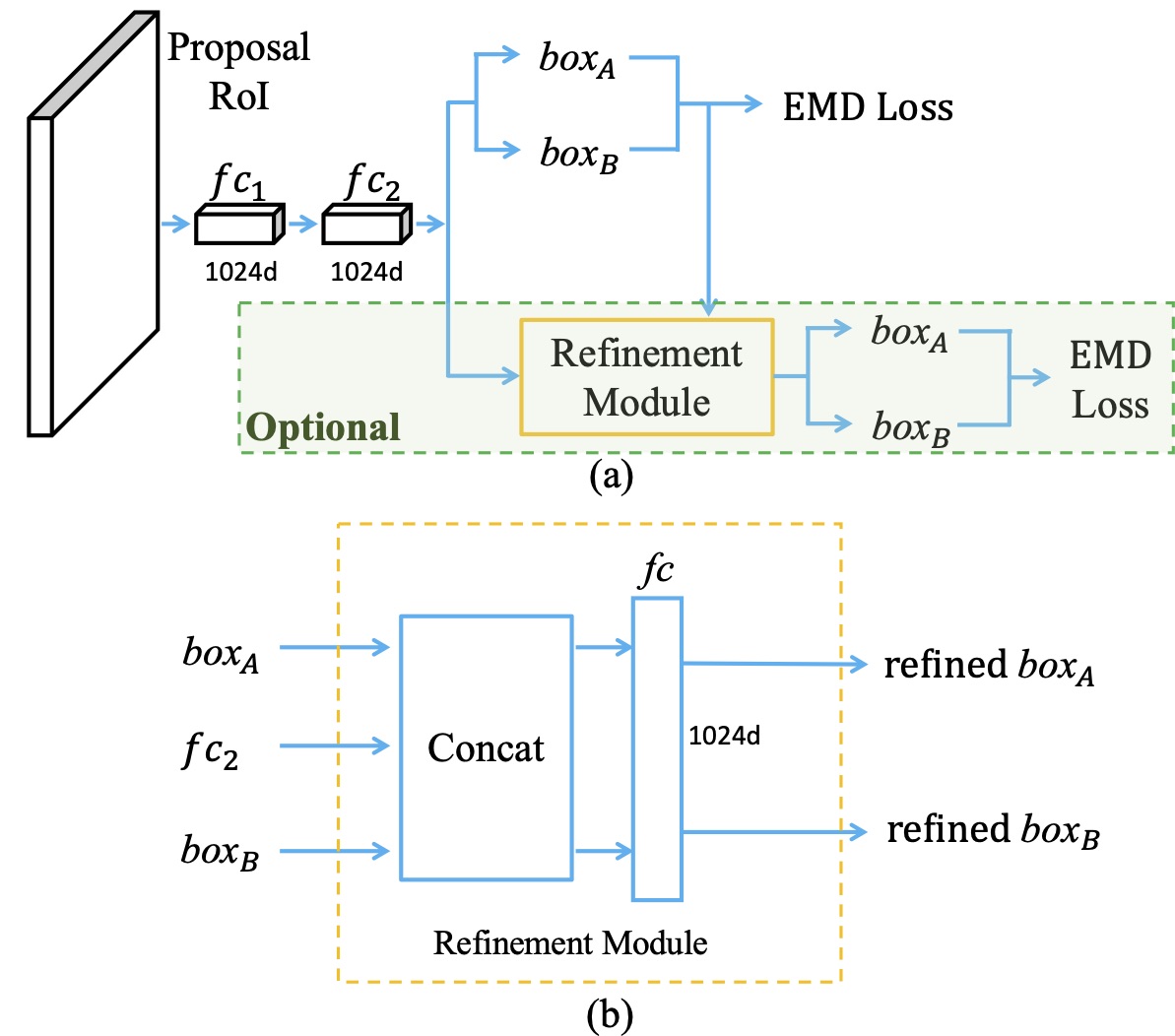
- Each anchor predicts K (K=2) bboxes. When K=1, CrowdDet reduces to normal object detection.
- EMD (earth mover’s distance) loss
- For all permutaions of matching, select the best matching one with smallest loss
- Add dummy boxes whose class label is regarded as Bg and without regression loss –> similar to the null padding in DETR.
- Set NMS: Do not suppress if the prediction are coming from the same proposal.
- Refinement module
- Concat predictions with feature vector and predict again.
- This is very similar to IterDet.
Technical details
- Test on COCO to verify that there is no performance degradation rather than significant performance improvement.
- AP vs MR in object detection.
- AP is more sensitive to recall. MR is very sensitive to FP with high confidence.