Learning-AI
Self-Mono-SF: Self-Supervised Monocular Scene Flow Estimation
June 2020
tl;dr: Self supervised estimation of depth and 3D scene flow (and as a side product, 2D optical flow).
Overall impression
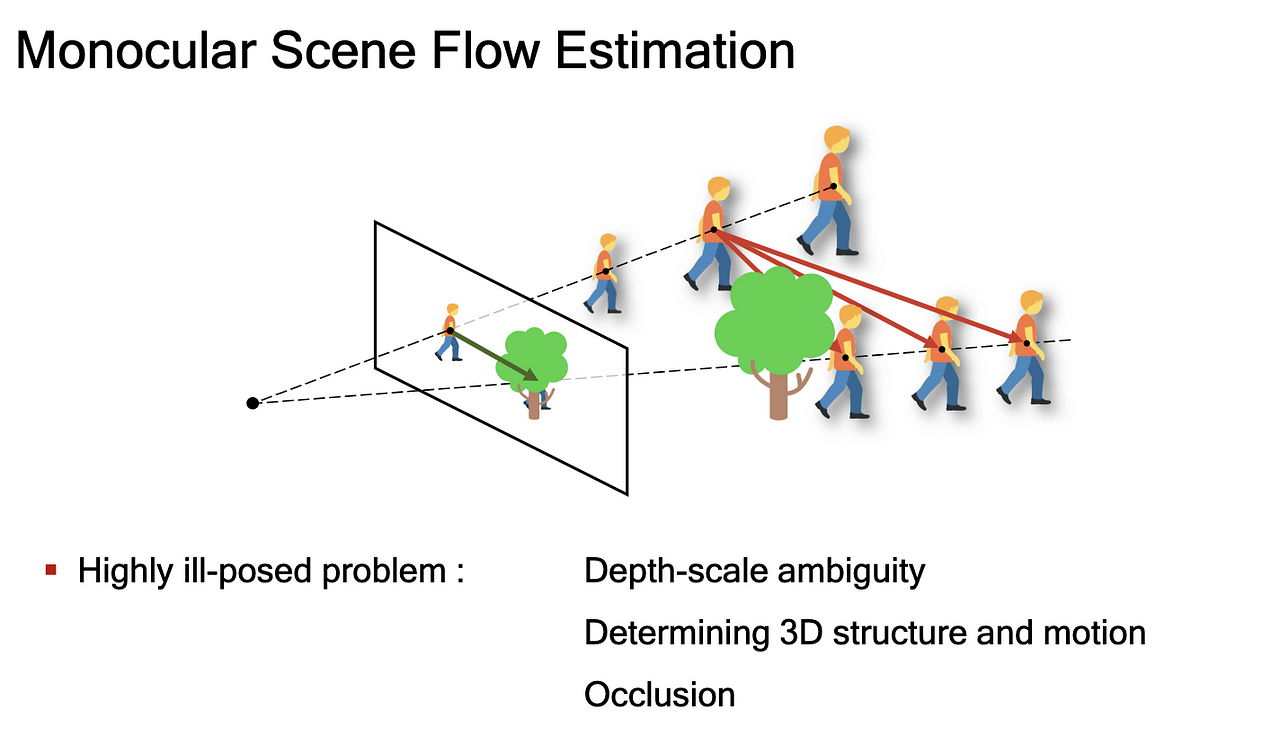
Scene flow estimation is the 3D version of optical flow. It requires depth estimation as well. It is a natural idea to extend the monocular prediction of optical flow and depth to scene flow.
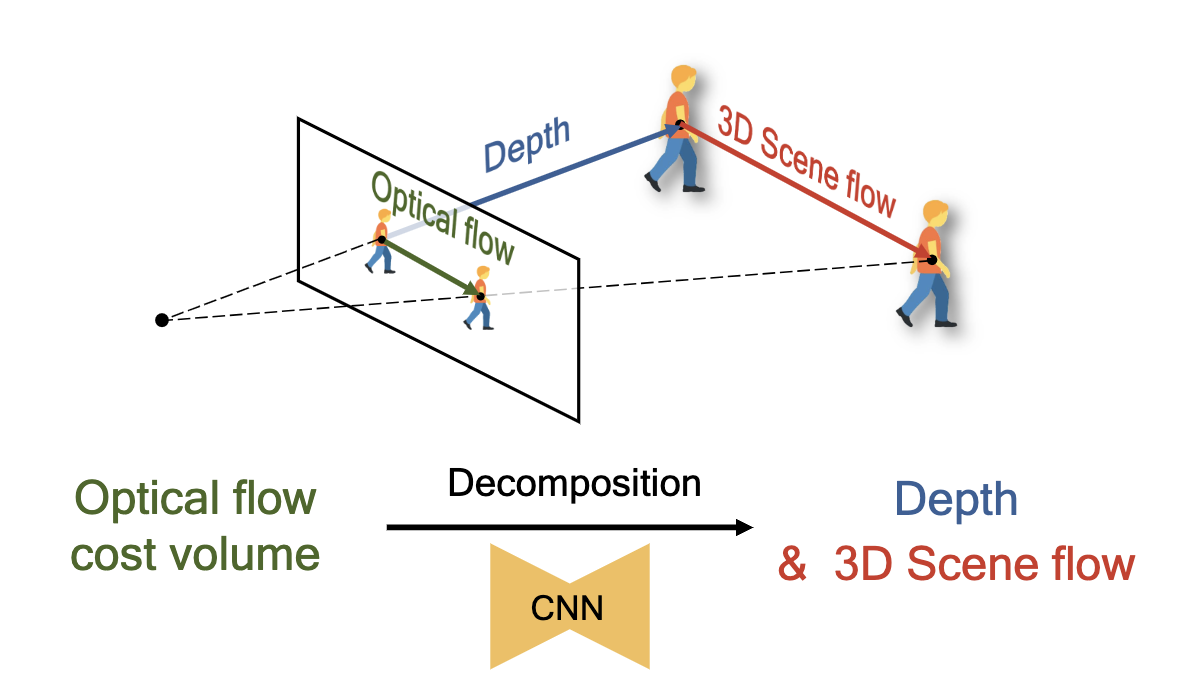
Optical flow is the 2D projection of a 3D point and its 3D scene flow. The scene flow is defined as 3D motion wrt the camera.
The architecture is heavily based on PWC Net for optical flow estimation.
Key ideas
- The main idea is the introduction of the 3D point loss, which penalizes the inconsistency between depth and scene flow estimation.
- Data augmentation with cam conv is better for depth prediction, but does not help with the performance degradation after data aug.
- Change output channel from 2D in PWC Net (2D optical flow) to 4D (depth + 3D scene flow).
- Loss
- Disparity loss: the same as self-supervised stereo system.
- Scene flow loss:
- photometric loss: target image –> lift to 3D –> add scene flow vector –> project to source –> compare with source
- point loss: src and target both project to 3d –> compare distance with scene flow vector
- edge aware scene flow loss
- Unified decoder for both depth and scene flow. Separating decoder leads to collapse in training.
- The performance for 2D optical flow is suboptimal but for 3D scene flow the best, as the loss regularizer is in 3D domain. Having a regularizer in the target domain is the best.
Technical details
- Self supervised, then finetune on 200 annotated images boosted the performance dramatically. –> This means self-supervised approach can boost the performance of data efficiency.
- This seems to learn a metric scale scene flow nicely.
Notes
- video
- github repo
- It requires stereo for training and only need monocular at inference time. –> This can be extended to use a mono video only, by changing depth loss from using stereo to using sequence with the help of PoseNet.