Learning-AI
CenterPoint: Center-based 3D Object Detection and Tracking
July 2020
tl;dr: CenterTrack for lidar 3D object detection.
Overall impression
The results are quite impressive. It almost doubles mAP from 30 PointPillars to 60 CenterPoint on nuScenes. Especially it improves the performance on buses and trucks.
The anchor-free object detection of AFDet (winner of 2020 Waymo Open Dataset challenge) is very close to CenterPoint.
The tracking with motion prediction idea is take one step further by SimTrack. It improves the bipartite matching by a direct look-up operation.
Key ideas
- Detect center of objects and regress other attributes such as 3D size, 3D orientation and velocity (offset vector in CenterTrack).
- Most of 3D space are without measurement. Need extra trick to make it work. Gaussian blur bigger. –> cf AFDet
- Radius function has min of 2 pixels.
- Representation matters!
- Point representation does not have intrinsic orientation.
- Using anchors for each object orientation works but is even more ugly and computation heavy.
- This reduces the search space (roughly anchor design space) and allows the backbone to learn the rotational invariance of object and rotational equivariance of their property.
- Architecture
- Off the shelf 3D encoders VoxelNet and PointPillars as backbone. VoxelNet backbone is heavier but still more accurate and PointPillars.
- Use CenterTrack head.
- Tracking with velocity (offset) prediction is done outside of neural network in a greedy fashion.
- Lidar aggregation: follow typical method (PointPillars) on nuscenes and agggregate 10 lidar frames within 0.5 seconds (20 Hz collection) to densify.
Technical details
- Fast NMS by max-pooling in centerNet changed to polar NMS to reflect circular symmetry.
- Data aug
- During training
- [0.95, 1.05] scaling, +/- 0.2 m translation, +/-pi/8 rotation.
- During testing
- Double flipping testing: 4 TTA copies –> We can add mirroring as well
- Simple average of heatmaps works without complicated NMS strategy
- During training
- higher resolution (0.1 m gird –> 0.075 m grid) helps
- Learned velocity is much faster than Kalman filter (91 ms to 1 ms)
Notes
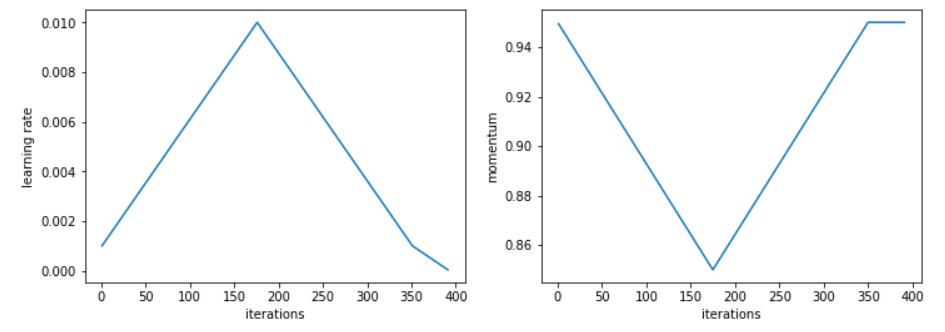
- One cycle policy. This trick is introduced in CBGS.
- Implementation in center point
- Find best LR first
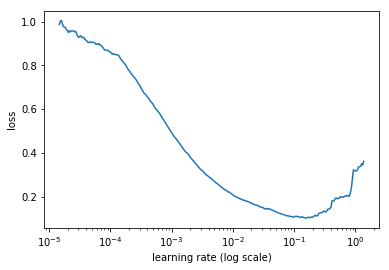
- Then fix max_lr to the argmin(loss) value. min_lr is roughly 10% of max_lr.